
刘旻哲,本科毕业于南京大学电子科学与工程学院(2018),现硕士在读于南京大学电子科学与工程学院。研究方向有:1、3D LiDAR点云感知算法,包括全景分割、语义分割等;2、主动学习和对比学习。
实习经历:2021年暑阿里,达摩院自动驾驶
研究课题:
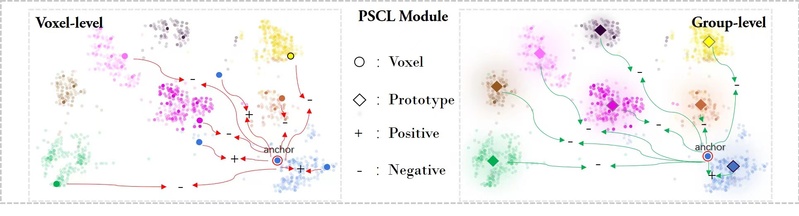
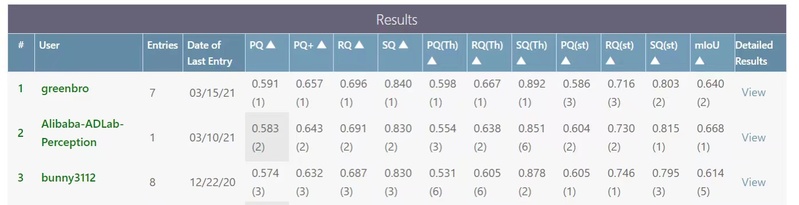
一、ICRA2022 基于原型监督对比学习的3D LiDAR点云全景分割框架
M. Liu et al., Prototype-Voxel Contrastive Learning for LiDAR Point Cloud Panoptic Segmentation, IEEE International Conference on Robotics and Automation 2022. Semantic-KITTI: Panoptic Segmentation 竞赛排行榜第一。
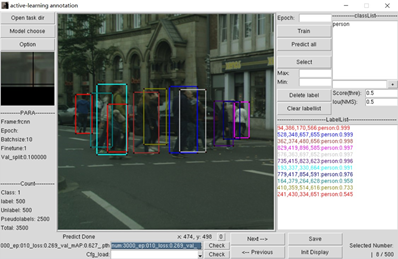
二、基于主动学习的加速标注工具 轻量级标注工具:易嵌入各种目标检测网络,界面简洁易用 加速数据集标注:利用主动学习的方式,在CityPerson行人数据集上能减少47.5%的标注时间(和手动标注相比)。
E-mail: mzliu@smail.nju.edu.cn